转位机械臂
空间站舱段自带的用于帮助舱段在对接机构间转位的机械臂
此条目可参照俄语维基百科相应条目来扩充。 (2022年8月13日) |
转位机械臂是一些空间站舱段上所搭载的一种专门用于辅助空间站上的航天器或舱段进行对接机位转移的特殊机械臂。在和平号空间站和天宫空间站上均有相关的对接辅助设备以支持舱段转位。


应用
编辑和平号空间站
编辑“爪”式机械臂[1]或“拉帕”机械臂(The Lyappa (Ljappa) arm),正式名称为“自动再对接系统”(俄语:Автоматическая система перестыковки (АСПр),罗马化:Avtomaticheskaya sistema perestykovki (ASPr))是和平号空间站在其建造组装阶段中所使用的一种转位机械臂。和平号空间站的量子2号、晶体号、光谱号以及自然号均搭载该臂以辅助转位过程。一般来说,在舱段对接至核心舱上的前端对接口之后,机械臂在转位中便会抓住设置在节点舱舱外上的两个固定装置之一,然后通过连接至原搭载舱段的另一端抬起该舱段,使其可以旋转90度以对接至其他四个径向对接端口之一。[2][3][4]
词源
编辑俄语中并不存在拉帕(Lyappa)这个词。但它很可能就是“俄语:лапа,罗马化:lapa,直译:爪”一词的某种衍生。
该操作中的一个全新元素便是再对接机械臂。有时我们直接称它为“爪”,这样会更清楚。这种电动机械臂短而有力,酷似西伯利亚熊的爪子,因此而得名。
图集
编辑-
 爪式机械臂以及和平号核心舱上的固定装置
爪式机械臂以及和平号核心舱上的固定装置 -
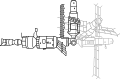
 位于能源火箭航天集团博物馆的爪式机械臂
位于能源火箭航天集团博物馆的爪式机械臂 -
 图示爪式机械臂辅助量子2号进行转位的方式
图示爪式机械臂辅助量子2号进行转位的方式 -
 图表显示“Konus”机械臂接口与对接舱段围绕和平号空间站核心舱的节点舱进行机动的对应关系
图表显示“Konus”机械臂接口与对接舱段围绕和平号空间站核心舱的节点舱进行机动的对应关系




天宫空间站
编辑天宫空间站的问天和梦天实验舱计划也将携带类似和平号空间站上使用的转位机械臂,以便其能够在天和核心舱的节点舱周围进行机动转移[6]。该臂在外观上与Lyappa机械臂类似,但与Lyappa机械臂不同的是,天宫空间站上的转位机械臂只能在同一个轴面上进行对接转位。除两个实验舱上所搭载的转位机械臂之外,天和核心舱上的主机械臂在必要时也可以作为备份使用[7][8]。
参考资料
编辑- ^ 如何制作空间站机械臂模型?. 知乎专栏. [2022-08-13]. (原始内容存档于2022-08-13) (中文).
- ^ David Harland. The Story of Space Station Mir. New York: Springer-Verlag New York Inc. 30 November 2004. ISBN 978-0-387-23011-5.
- ^ David S. F. Portree. Mir Hardware Heritage. NASA. March 1995 [2022-08-13]. (原始内容存档于2009-07-15).
- ^ Archived copy (PDF). [2012-02-11]. (原始内容 (PDF)存档于2011-10-15).
- ^ Сыромятников 2010,第189—197页,Перестыковка: как часовой механизм.
- ^ Graham, William; Gebhardt, Chris. China readies launch of Tianhe module, start of ambitious two-year station construction effort. NASASpaceflight.com. April 28, 2021 [2022-08-13]. (原始内容存档于2021-05-19).
This means the two future science modules, Wentian (“Quest for the heavens”) and Mengtian (“Dreaming of the heavens”), cannot dock directly to their planned radial port locations. [...] To account for this, each module will carry a Russian Lyappa robotic arm — like the ones used on Mir for the same purpose — to move the module from the forward port to its respective permanent location on a radial port of Tianhe's docking hub.
- ^ Hong Yang. Manned Spacecraft Technologies. China: Springer. 2020: 355. ISBN 978-9811548970.
- ^ Graham, William; Gebhardt, Chris. China readies launch of Tianhe module, start of ambitious two-year station construction effort. NASASpaceflight.com. April 28, 2021 [2022-08-13]. (原始内容存档于2021-05-19).
参考文献
编辑- Сыромятников, Владимир. 100 рассказов о стыковке. Часть 2. М.: Университетская книга Логос. 2010. ISBN 978-5-98704-455-1 (俄语).
| 这是一篇与机器人技术相关小作品。您可以通过编辑或修订扩充其内容。 |