好奇号
此条目需要更新。 (2019年6月25日) |
好奇号(英语:Curiosity)是一辆美国国家航空航天局火星科学实验室辖下的火星探测器,主要任务是探索火星的盖尔撞击坑[6],为美国国家航空航天局火星科学实验室计划的一部分。
 | |
| 任务类型 | 火星探测车 |
|---|---|
| 运营方 | NASA |
| 网站 | https://mars.nasa.gov/msl/home/ |
| 任务时长 | 计划23地球月 自降落已4514日,即12年4个月又9天,持续中 |
| 航天器属性 | |
| 航天器类型 | 火星车 |
| 制造方 | 波音、洛克希德·马丁、喷射推进实验室 |
| 干质量 | 900 公斤 |
| 尺寸 | 长 2.9 米, 宽 2.7 米, 高 2.2 米 |
| 任务开始 | |
| 发射日期 | 2011年11月26日 15:02:00.211 UTC (10:02 EST)[1][2] |
| 运载火箭 | 擎天神五号541型 (AV-028) |
| 发射场 | 卡纳维拉尔角空军基地 LC-41[3] |
| 火星探测车 | |
| 着陆日期 | 2012年8月5日, 05:17 UTC SCET[4] MSD 49269 05:50 AMT |
| 着陆点 | 盖尔撞击坑埃俄利斯沼(布雷德伯里着陆场)[5],4°35′31″S 137°26′25″E / 4.59194°S 137.44028°E |
好奇号在2011年11月26日协调世界时下午15时02分于卡纳维拉尔角空军基地进入火星科学实验室航天器,并成功在2012年8月6日协调世界时05时17分于盖尔陨石坑内的伊奥利亚沼着陆[4]。好奇号经过56,300万公里的旅程,着陆时离预定着陆点布雷德伯里着陆场[5]只相差2.4公里[7],这标志着它完成了经过5.6亿公里(3.5亿英里)的旅程。
好奇号的任务目标包括研究火星气候和火星地质特征,评估盖尔陨石坑内选择的地点是否曾经具备适合微生物生存的环境条件(特别是水的作用),并为人类日后探索火星的行星适居性做准备。[8][9]2012年12月,好奇号原本执行2年的探测任务被无限期延长[10],2017年8月5日,NASA庆祝了好奇号在火星上着陆五周年。2022年8月6日,媒体报导了好奇号在过去十年中取得的详细成就。
NASA/JPL火星科学实验室的好奇号专案团队因“成功将好奇号安全着陆在火星、提升国家技术和工程能力,并显著改善人类对古代火星可居住环境的理解”而获得了2012年国家航空协会颁发的科利尔奖。好奇号的探测车设计成为NASA毅力号火星探测器的基础,该任务携带了不同的科学仪器。
命名
编辑由儿童和青少年命名火星车是NASA的惯例。2008年11月18日,一项面向全美五岁至十八岁学生的为火星车命名的比赛开始。2009年3月23日至29日,普通公众有机会为九个进入决定的名字进行投票,为火星车的最终命名作为参考。2009年5月27日,NASA宣布六年级的女生马天琪(Clara Ma)的“好奇”最终赢得了胜利[11]。
成果
编辑2013年9月19日,根据从好奇号得到的进一步测量数据,NASA科学家报告,并没有侦测到大气甲烷(atmospheric methan)存在迹象,测量值为0.18±0.67 ppbv,对应于1.3 ppbv上限(95%置信限),因此总结甲烷微生物活性概率很低,可能火星不存在生命。但是,很多微生物不会排出任何甲烷,仍旧可能在火星发现这些不会排出任何甲烷的微生物。[12][13][14]
2015年9月26日,美国航空航天局科学家报告,火星探测器好奇号发现火星土壤含有丰富水分,大约为1.5至 3重量百分比,显示火星有足够的水资源供给未来移民使用。[15][16][17][18]
装置
编辑主控电脑
编辑采用2台(其中一台为备用)IBM特制型号的电脑,可以承受-55和70度气温变化以及1000戈瑞的辐射水平。[19]
科学仪器
编辑
火星着陆相机(MARDI)
编辑
火星着陆相机固定在“好奇号”车体的左前下角,在降落到火星表面过程中,着陆相机在距地面约3.7公里(2.3英里)到近5米(16英尺)的空中开始,以每秒四帧,每次曝光1.3毫秒的速度拍摄了约两分钟1600×1200像素的彩色图像[20][21]。火星着陆相机的像素比例变化范围从2公里(1.2英里)处的1.5米(4.1英尺11英寸)到2米(6英尺7英寸)处的1.5毫米(0.059英寸),并拥有90度的圆形视场。着陆相机配备了8G内部缓存,能存储4000多幅原始图像。它拍摄的图像可绘制周边地形和着陆位置的地图[20]。朱诺相机是依据火星着陆相机专为“朱诺号”探测器研制[22]。
机械手臂
编辑
好奇号火星车配备了一条2.1米(6英尺11英寸)长的机械手臂,末端带一座能容纳五件设备的十字型转台,可在350°范围内旋转来转动所持的五件设备[24][25]。该机械臂利用三个关节向前伸展,并在行驶时收起,总质量30千克(66磅),直径(包括安装在上面的工具)约为60厘米(24英寸)[26]。它由MDA美国系统公司在之前的火星探测器2001着陆器、凤凰号着陆器和勇气号、机遇号两辆火星漫游车的机械臂基础上设计、制造和测试的。
五台设备中有两台是现场或接触式仪器,称为阿尔法粒子X射线光谱仪(APXS)和火星手部透镜成像仪(马赫利相机),其余三件与样品采集和处理功能有关:冲击钻、刷把、挖斗、筛分和分配粉末状岩石和土壤样品[24][26]。钻孔后岩石中的钻孔直径为1.6厘米(0.63英寸),深度可达5厘米(2.0英寸)[25][27]。
钻机上配备了两只备用钻头[28]。火星车的机械臂和转台系统可将阿尔法粒子X射线光谱仪和火星手部透镜成像仪放置在各自的目标前, 并钻入岩石内采集粉末样品,然后交由车内的火星样本分析设备(SAM)和化学与矿物分析仪进行化验,并将结果实时发回美国宇航局[25]。
自2015年初以来,钻机中帮助凿岩的冲击机构出现间歇性短路。2016年12月1日,钻机内的电机又发生故障,导致漫游车无法移动机械臂并行驶到其他位置。故障隔离了钻机饲服制动器,怀疑是内部碎屑所导致。截至2016年12月9日,行驶和机械臂操作被恢复,但钻机仍无限期暂停。好奇号团队在2017年继续对钻机机构进行诊断和测试,并于2018年5月22日成功恢复钻探作业。
通讯速度
编辑好奇号与地球的直接数据带宽大约8Kbit/s左右,但与火星上的3个轨道器的最理想传输带宽则能达到2兆节/秒[29],而2001火星奥德赛号与地球的最大带宽为256Kbit/s,火星侦查轨道器与地球的最大带宽为6Mbit/s,但大部分的时间都不会达到此速度。
当火星侦查轨道器或火星特快车从漫游车上空飞过时,每次能通讯八分钟,最多能传输100~250Mbit的数据,而这100~250Mbit数据需要等待下一次与地球通讯才能传输到地球,若火星奥德赛号与漫游车和地球同时通讯时,火星奥德赛号可以将漫游车的缓冲资料立刻传送。
特别装置
编辑1美分硬币
编辑
这是一枚印有美国前总统林肯头像的1美分古董硬币,一个多世纪以前它诞生于美国造币厂,也是目前仍在流通的、使用时间最长的美国硬币。1909年,时任总统罗斯福下令制造这种硬币,以庆祝林肯诞辰100周年。[30]
虽然币值只有1美分,但如果以这枚硬币在耗资25亿美元的“好奇号”探索火星之旅中起到的作用来估量的话,它的价值高达7000美元。这枚硬币是“好奇号”火星手持透镜成像仪(Mars Hand Lens Imager, MAHLI)的一个重要零件。火星手持透镜成像仪位于“好奇号”机械臂末端,功能相当于一个超级放大镜,可以拍摄火星表面岩石、土壤的详细图像。
地理学家拍照时经常使用硬币作为校准器来确保照片比例精准。虽然“好奇号”火星探测器上装有其他更为复杂精致的校准器,但是美国国家航空航天局(NASA)还是决定把这枚由火星手持透镜成像仪工程师肯恩·埃迪特捐赠的硬币带上火星,以示对传统科学的尊重。
轮胎花纹
编辑好奇号火星漫游车以莫尔斯电码形式在火星上留下了喷气推进实验室的标志[31]。好奇号在测试行驶中留下轮胎标记,以作为估计行驶距离的参考点。
NASA称,在火星表面缺乏明显地标的情况下,漫游车的视觉测距系统可利用这些标记测量距离。轮胎花纹不是普通的直线,而是点缀了对应莫尔斯电码中的点和破折号,每个轮子印有三个字符• – – – / • – – • / • – • •,翻译成英语是JPL,即负责漫游车的喷气推进实验室(Jet Propulsion Laboratory)名字缩写。
着陆
编辑着陆地点
编辑
画廊
编辑-
好奇号的降落。
-
 Mast head with ChemCam, MastCam-34, MastCam-100, and NavCam
Mast head with ChemCam, MastCam-34, MastCam-100, and NavCam -
 Rover wheels are 50 cm(20英寸) in diameter
Rover wheels are 50 cm(20英寸) in diameter


-
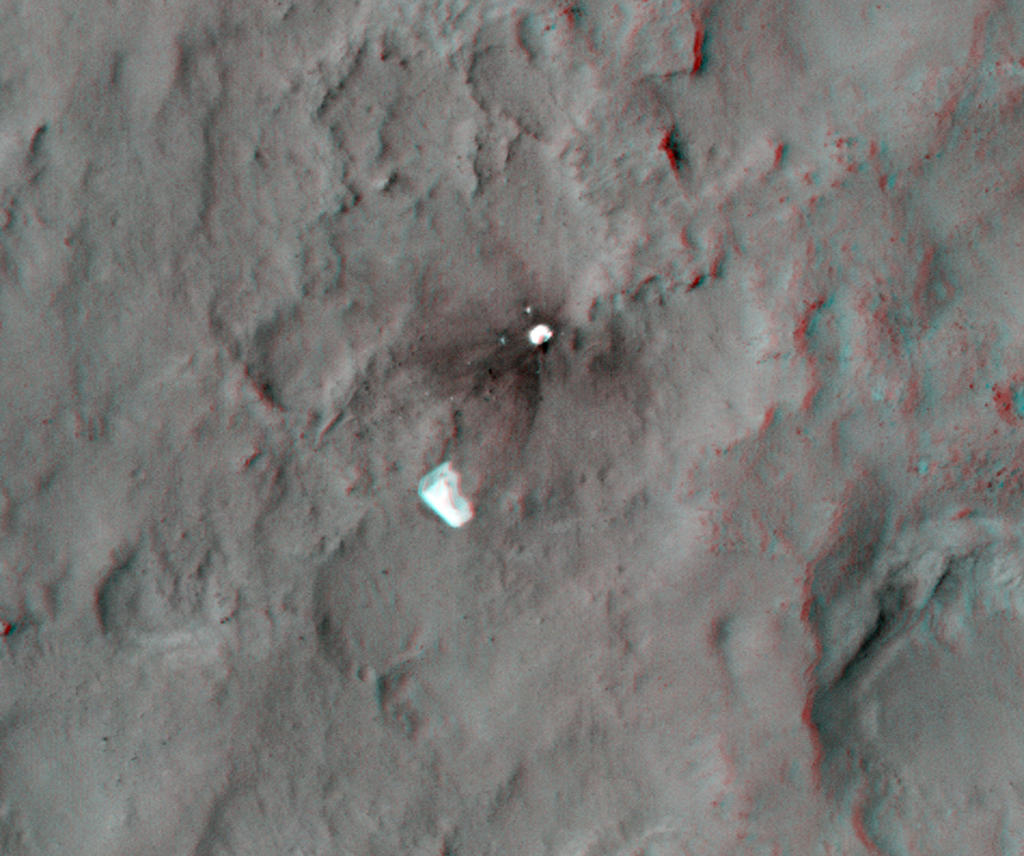
 Ejected Heat Shield (4.5米(15英尺) diameter) falling away, as viewed by MARDI on Curiosity as the rover descended to the Martian surface (August 6, 2012 05:17 UTC).
Ejected Heat Shield (4.5米(15英尺) diameter) falling away, as viewed by MARDI on Curiosity as the rover descended to the Martian surface (August 6, 2012 05:17 UTC). -
 Curiosity's first image after landing (August 6, 2012). The rover's wheel can be seen.
Curiosity's first image after landing (August 6, 2012). The rover's wheel can be seen. -
 Curiosity's image (without clear-dust-cover) after landing (August 6, 2012).
Curiosity's image (without clear-dust-cover) after landing (August 6, 2012). -
![Curiosity landed on August 6, 2012 near the base of Aeolis Mons (or "Mount Sharp")[32]](//upload.wikimedia.org/wikipedia/commons/thumb/6/65/673885main_PIA15986-full_full.jpg/140px-673885main_PIA15986-full_full.jpg) Curiosity landed on August 6, 2012 near the base of Aeolis Mons (or "Mount Sharp")[32]
Curiosity landed on August 6, 2012 near the base of Aeolis Mons (or "Mount Sharp")[32] -
 Curiosity's first color image of the Martian landscape - taken by MAHLI (August 6, 2012).
Curiosity's first color image of the Martian landscape - taken by MAHLI (August 6, 2012). -

-
![Calibration Target of the "Mars Hand Lens Imager (MAHLI)" (September 9, 2012) (3-D image[永久失效链接]).](//upload.wikimedia.org/wikipedia/commons/thumb/a/a1/PIA16132-MarsCuriosityRover-CalibrationTarget-20120909.jpg/151px-PIA16132-MarsCuriosityRover-CalibrationTarget-20120909.jpg)
-
 "US Lincoln Penny" on Mars - part of a Calibration Target on Curiosity (September 10, 2012) (3-D image).
"US Lincoln Penny" on Mars - part of a Calibration Target on Curiosity (September 10, 2012) (3-D image). -

-
![Curiosity's tracks on first test drive (August 22, 2012) "parking" 6.0米(19.7英尺) from original site ("Bradbury Landing").[5]](//upload.wikimedia.org/wikipedia/commons/thumb/6/63/PIA16094-Mars_Curiosity_Rover-First_Drive_Tracks.jpg/140px-PIA16094-Mars_Curiosity_Rover-First_Drive_Tracks.jpg) Curiosity's tracks on first test drive (August 22, 2012) "parking" 6.0米(19.7英尺) from original site ("Bradbury Landing").[5]
Curiosity's tracks on first test drive (August 22, 2012) "parking" 6.0米(19.7英尺) from original site ("Bradbury Landing").[5] -
 Comparison of color versions (raw, natural, white balance) of Aeolis Mons on Mars (August 23, 2012).
Comparison of color versions (raw, natural, white balance) of Aeolis Mons on Mars (August 23, 2012). -
 Curiosity's view of Aeolis Mons (white-balanced image) (August 9, 2012).
Curiosity's view of Aeolis Mons (white-balanced image) (August 9, 2012). -
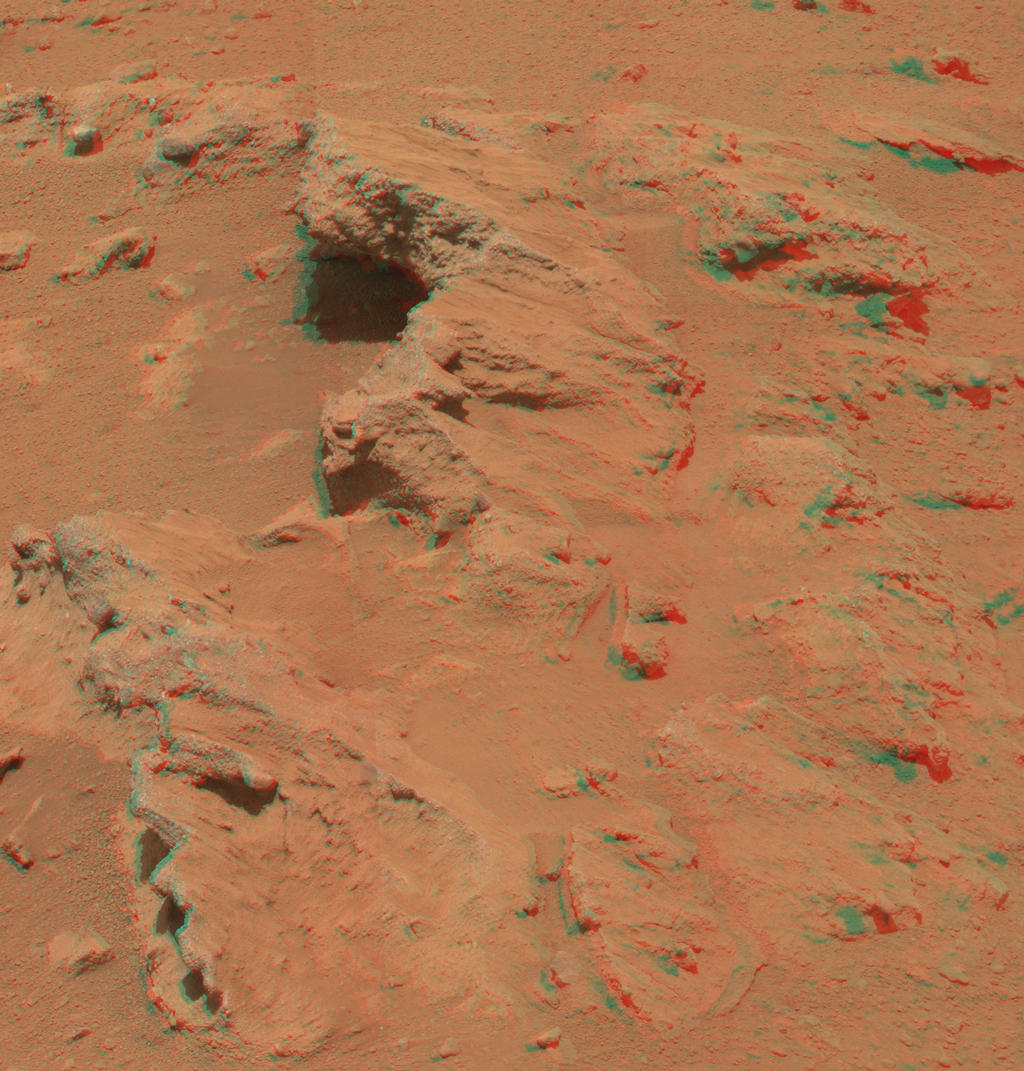
 Layers at the base of Aeolis Mons - dark rock in inset is same size as Curiosity
Layers at the base of Aeolis Mons - dark rock in inset is same size as Curiosity



![Curiosity landed on August 6, 2012 near the base of Aeolis Mons (or "Mount Sharp")[32]](/wiki/File:673885main_PIA15986-full_full.jpg)




![Curiosity's tracks on first test drive (August 22, 2012) "parking" 6.0米(19.7英尺) from original site ("Bradbury Landing").[5]](/wiki/File:PIA16094-Mars_Curiosity_Rover-First_Drive_Tracks.jpg)



-

-
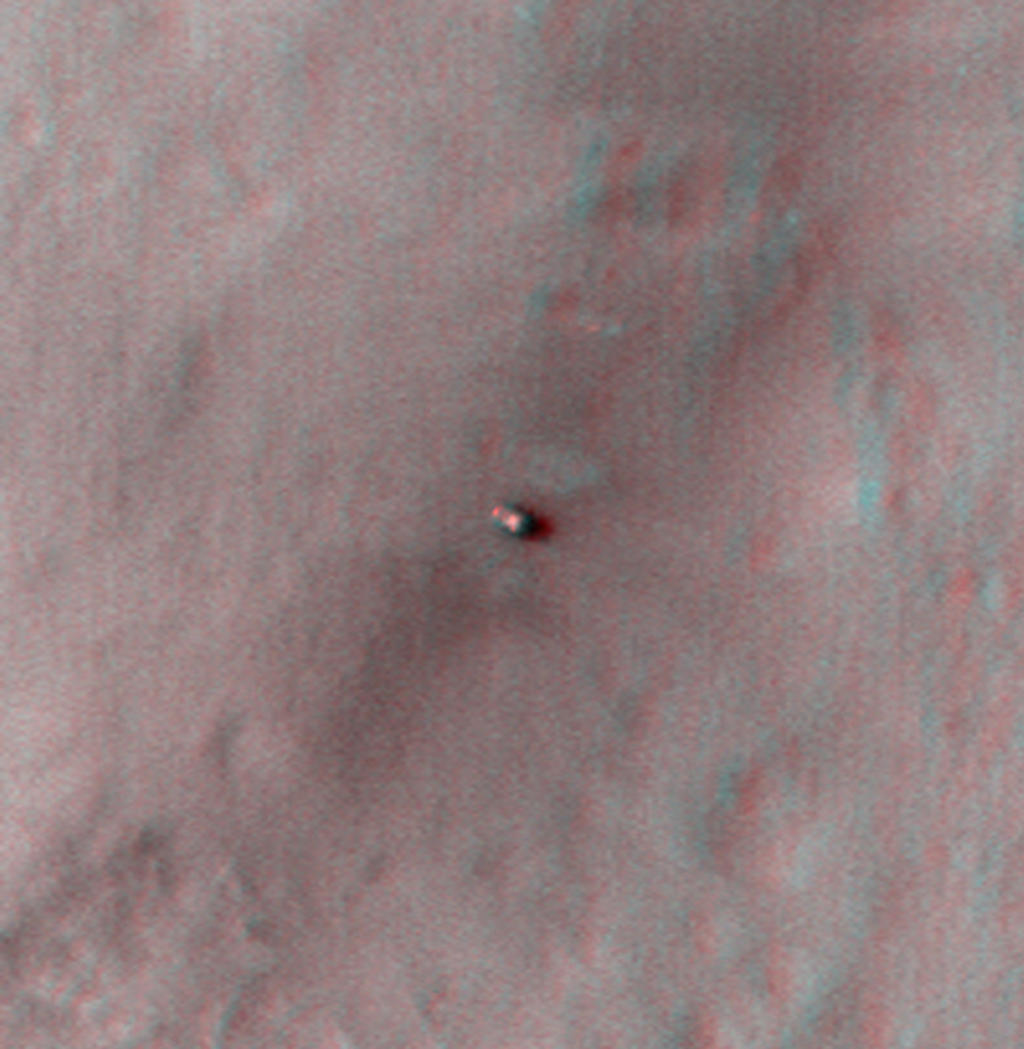
 Curiosity's parachute flapping in the Martian wind (HiRISE/MRO) (August 12, 2012 to January 13, 2013).
Curiosity's parachute flapping in the Martian wind (HiRISE/MRO) (August 12, 2012 to January 13, 2013). -

-
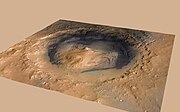 Aeolis Mons rises from the middle of Gale Crater - Green dot marks Curiosity's landing site in Aeolis Palus - north is down.
Aeolis Mons rises from the middle of Gale Crater - Green dot marks Curiosity's landing site in Aeolis Palus - north is down. -
 Curiosity's landing site (green dot) - blue dot marks Glenelg - blue spot marks "base of Mount Sharp" - a planned area of study.
Curiosity's landing site (green dot) - blue dot marks Glenelg - blue spot marks "base of Mount Sharp" - a planned area of study. -
 Curiosity's landing site - "Quad Map" includes "Yellowknife" Quad 51 of Aeolis Palus in Gale Crater.
Curiosity's landing site - "Quad Map" includes "Yellowknife" Quad 51 of Aeolis Palus in Gale Crater. -
 Curiosity's landing site - the "Yellowknife" Quad 51 (1-mi-by-1-mi) of Aeolis Palus in Gale Crater.
Curiosity's landing site - the "Yellowknife" Quad 51 (1-mi-by-1-mi) of Aeolis Palus in Gale Crater. -

-

-

-
 Map of Curiosity's route on Mars - moving east from "Bradbury Landing" to "Glenelg" (Sol 302, June 12, 2013) (3-D).
Map of Curiosity's route on Mars - moving east from "Bradbury Landing" to "Glenelg" (Sol 302, June 12, 2013) (3-D).
.png)







_-_HiRISE_-_20120814.jpg)





- 宽幅图片




其他
编辑| 探测车(任务、组织、年份) | 芯片 | 内存 | 闪存 | 只读内存 | 操作系统 | 自主软件可用芯片时间 |
|---|---|---|---|---|---|---|
| 旅居者号探测车 (1997年美国宇航局火星探路者号)[37] [38][39][40] | 2 兆赫[41]Intel 80C85 | 512 KB | 176 KB | 无 | 自定义循环执行 | 不适用于循环执行 |
| 探路者号着陆器 (1997年美国宇航局)[37] (旅居者号探测车的平台) |
20 兆赫 MFC | 128 MB | 无 | 6 MB | VxWorks[42] (多任务处理) | 低于75% |
| 勇气号和机遇号 (火星探测漫游者,2004年美国宇航局)[37] | 20 兆赫 BAE RAD6000 | 128 MB | 256 MB | 3 MB | VxWorks(多任务处理) | 低于75% |
| 好奇号 (火星科学实验室,2011年美国宇航局)[37][43][44] | 200 兆赫 BAE RAD750 | 256 MB | 2 GB | 25 KB | VxWorks(多任务处理) | 低于75% |
| 毅力号 (火星2020,2020年美国宇航局)[45] | 200 兆赫 BAE RAD750 | 256 MB | 2 GB | 256 KB | VxWorks(多任务处理)[46] | ? |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
参看
编辑参考资料
编辑- ^ Curiosity: NASA's Next Mars Rover. NASA. 2012年8月6日 [2012年8月6日]. (原始内容存档于2013年5月29日).
- ^ Beutel, Allard. NASA's Mars Science Laboratory Launch Rescheduled for Nov. 26. NASA. 2011年11月19日 [2011年11月21日]. (原始内容存档于2012年8月17日).
- ^ Martin, Paul K. NASA'S MANAGEMENT OF THE MARS SCIENCE LABORATORY PROJECT (IG-11-019) (PDF). NASA Office of Inspector General. 2011年6月8日 [2012年8月6日]. (原始内容存档 (PDF)于2011年12月3日).
- ^ 4.0 4.1 MSL Sol 3 Update. NASA Television. 2012-08-08 [2012年8月9日]. (原始内容存档于2012-08-09).
- ^ 5.0 5.1 5.2 Brown, Dwayne; Cole, Steve; Webster, Guy; Agle, D.C. NASA Mars Rover Begins Driving at Bradbury Landing. NASA. 2012年8月22日 [2012年8月22日]. (原始内容存档于2016年11月15日) (英语).
- ^ Nelson, Jon. Mars Science Laboratory Curiosity Rover. NASA. [2014-02-02]. (原始内容存档于2015-08-18).
- ^ Impressive' Curiosity landing only 1.5 miles off, NASA says. CNN. [2012年8月10日]. (原始内容存档于2012年8月11日) (英语).
- ^ Overview. JPL. [2012年8月16日]. (原始内容存档于2012年8月1日) (英语).
- ^ Mars Science Laboratory: Mission Science Goals. JPL. NASA. 2012年8月 [2012-08-21]. (原始内容存档于2012-08-15) (英语).
- ^ Curiosity's mission extended indefinitely. 3 News NZ. 2012-12-06 [2014-06-25]. (原始内容存档于2013-04-06).
- ^ NASA Selects Student's Entry as New Mars Rover Name. [2014-06-30]. (原始内容存档于2012-02-20).
- ^ Webster, Christopher R.; Mahaffy, Paul R.; Atreya, Sushil K.; Flesch, Gregory J.; Farley, Kenneth A. Low Upper Limit to Methane Abundance on Mars. Science (journal). 2013-09-19 [2013-09-19]. doi:10.1126/science.1242902. (原始内容存档于2013-09-23).
- ^ Cho, Adrian. Mars Rover Finds No Evidence of Burps and Farts. Science (journal). 2013-09-19 [2013-09-19]. (原始内容存档于2013-09-20).
- ^ Chang, Kenneth. Mars Rover Comes Up Empty in Search for Methane. New York Times . 2013-09-19 [2013-09-19]. (原始内容存档于2014-04-11).
- ^ Leshin, L. A.; et al. Volatile, Isotope, and Organic Analysis of Martian Fines with the Mars Curiosity Rover. Science (journal). 2013-09-27, 341 (6153) [2013-09-26]. doi:10.1126/science.1238937. (原始内容存档于2015-12-29).
- ^ Neal-Jones, Nancy; Zubritsky, Elizabeth; Webster, Guy; Martialay, Mary. Curiosity's SAM Instrument Finds Water and More in Surface Sample. NASA. 2013-09-26 [2013-09-27]. (原始内容存档于2019-05-02).
- ^ Webster, Guy; Brown, Dwayne. Science Gains From Diverse Landing Area of Curiosity. NASA. 2013-09-26 [2013-09-27]. (原始内容存档于2019-05-02).
- ^ Chang, Kenneth. Hitting Pay Dirt on Mars. New York Times. 2013-10-01 [2013-10-02]. (原始内容存档于2013-10-02).
- ^ Curiosity: 17 cameras, plutonium, and an 11-year-old computer. The Verge. 2012-08-07 [2012-09-30]. (原始内容存档于2012-10-10) (美国英语).
- ^ 20.0 20.1 引用错误:没有为名为
MARDI的参考文献提供内容 - ^ 引用错误:没有为名为
Mars Descent Imager (MARDI) Update的参考文献提供内容 - ^ 引用错误:没有为名为
Junocam, Juno Jupiter Orbiter的参考文献提供内容 - ^ Anderson, Paul Scott. Curiosity 'hammers' a rock and completes first drilling tests. themeridianijournal.com. 2013-02-03 [2013-02-03]. (原始内容存档于2013-02-06).
- ^ 24.0 24.1 Curiosity Rover - Arm and Hand. JPL. NASA. [2012-08-21]. (原始内容存档于2012-08-26).
- ^ 25.0 25.1 25.2 Mars Science Laboratory Sample Acquisition, Sample Processing and Handling: Subsystem Design and Test Challenges (PDF). JPL. NASA. [2012-08-21]. (原始内容存档 (PDF)于2013-11-24). Authors list列表中的
|first1=缺少|last1=(帮助) - ^ 26.0 26.1 Curiosity Stretches its Arm. JPL (NASA). 2012-08-21 [2012-08-21]. (原始内容存档于2012-08-22).
- ^ MSL Participating Scientists Program - Proposal Information Package (PDF). Washington University. 2010-12-14 [2012-08-21]. (原始内容存档 (PDF)于2012-11-07).
- ^ Billing, Rius; Fleischner, Richard. Mars Science Laboratory Robotic Arm (PDF). 15th European Space Mechanisms and Tribology Symposium 2011. 2011 [2012-08-21]. (原始内容存档 (PDF)于2013-05-31).
- ^ Andre Makovsky, Jim Taylor. Mars Science Laboratory Telecommunications System Design (PDF). Jet Propulsion Laboratory. [2012-09-30]. (原始内容 (PDF)存档于2013-02-28) (英语).
- ^ 天天新闻. 1美分硬币帮助“好奇号”探火星. 天天新闻. 2012-09-12 [2012-09-12] (中文(中国大陆)).[永久失效链接]
- ^ cnbeta. 好奇号在火星上留下莫尔斯电码. cnbeta. 2012-08-30 [2012-09-12]. (原始内容存档于2012-09-01) (中文(中国大陆)).
- ^ 32.0 32.1 Williams, John. A 360-degree 'street view' from Mars. PhysOrg. 2012-08-15 [2012-08-16]. (原始内容存档于2013-12-03).
- ^ Brown, Dwayne; Cole, Steve; Webster, Guy; Agle, D.C. NASA Rover Finds Old Streambed On Martian Surface. NASA. 2012-09-27 [2012-09-28]. (原始内容存档于2013-05-16).
- ^ NASA. NASA's Curiosity Rover Finds Old Streambed on Mars - video (51:40). NASAtelevision. 2012-09-27 [2012-09-28]. (原始内容存档于2012-09-29).
- ^ Chang, Alicia. Mars rover Curiosity finds signs of ancient stream. AP News. 2012-09-27 [2012-09-27]. (原始内容存档于2013-05-16).
- ^ Bodrov, Andrew. Mars Panorama - Curiosity rover: Martian solar day 2. 360Cities. 2012-09-14 [2012-09-14]. (原始内容存档于2012-08-19).
- ^ 37.0 37.1 37.2 37.3 Max Bajracharya, Mark W. Maimone, Daniel Helmick (2008) (Jet Propulsion Laboratory and California Institute of Technology); Autonomy for Mars rovers: past, present, and future; published in: Computer, a journal of the IEEE Computer Society, December 2008, Volume 41, Number 12, page 45, ISSN 0018-9162.
- ^ Mars Pathfinder Frequently Asked Questions: Sojourner Rover. NASA/JPL. April 10, 1997 [March 27, 2009].
- ^ Donna L. Shirley and Jacob R. Matijevic. Mars Rovers: Past, Present, & Future. NASA/JPL. May 10, 1997 [April 18, 2009].
- ^ Larry Lange. U.S. plays catch-up as robots crawl into new applications. EETimes.com. February 18, 1998 [April 18, 2009].
- ^ http://mars.jpl.nasa.gov/MPF/rover/faqs_sojourner.html#cpu
- ^ Wind River Powers Mars Exploration Rovers—Continues Legacy as Technology Provider for NASA's Space Exploration. Wind River. June 6, 2003 [August 28, 2009].
- ^ Mars Science Laboratory: Mission: Rover: Brains. NASA/JPL. [March 27, 2009].
- ^ BAE SYSTEMS COMPUTERS TO MANAGE DATA PROCESSING AND COMMAND FOR UPCOMING SATELLITE MISSIONS. BAE Systems. June 17, 2008 [November 17, 2008].
- ^ mars.nasa.gov. Brains - Mars 2020 Rover. mars.nasa.gov. [2017-11-29].
- ^ Prototyping an Onboard Scheduler for the Mars 2020 Rover (PDF).
外部链接
编辑- Curiosity - NASA's Mars Exploration Program (页面存档备份,存于互联网档案馆)
- The search for life on Mars and elsewhere in the Solar System: Curiosity update - Video lecture by Christopher P. McKay (页面存档备份,存于互联网档案馆)
- MSL - Curiosity Design and Mars Landing - PBS Nova (14 November 2012) - Video (53:06) (页面存档备份,存于互联网档案馆)
- MSL - "Curiosity 'StreetView'" (Sol 2 - 8 August 2012) - NASA/JPL - 360° Panorama (页面存档备份,存于互联网档案馆)
- MSL - Curiosity Rover - Learn About Curiosity - NASA/JPL
- MSL - Curiosity Rover - Virtual Tour - NASA/JPL
- MSL - NASA Image Gallery 互联网档案馆的存档,存档日期January 7, 2020,.
- Weather Reports (页面存档备份,存于互联网档案馆) from the Rover Environmental Monitoring Station (REMS)
- 好奇号的X(前Twitter)账号
- MSL - NASA Update - AGU Conference (3 December 2012) Video (70:13) (页面存档备份,存于互联网档案馆)
- Panorama (页面存档备份,存于互联网档案馆) (via Universe Today)
- Curiosity's Proposed Path up Mount Sharp NASA May 2019 (页面存档备份,存于互联网档案馆)